|
#2
22nd September 2016, 01:05 PM
| |||
| |||
| Re: PGCET ECE Previous Question Papers
Andhra Pradesh Post Graduate Engineering Common Entrance Test is a Common Entracne Exam for PG Courses in Engineering, Technology, Pharmacy and Planning (ME / M.Tech. / M.Pharmacy/Graduate level Pharm-D (Post Baccalaureate)) Conducted by the Jawaharlal Nehru Technological University (JNTU) Kakinada the Question paper of the Electronics and Communication Engineering of the AP PGECET Examination is as Follow If the coefficient of correlation is 0.98, then thevariables are (A) Negatively correlated (B) Weak positively correlated (C) Strong positively correlated (D) Uncorrelated Which one of the following is a series method ? (A) Picards Method (B) Euler method (C) Milne Method (D) Runge Kutta Method The response of an LTI discrete-time system to a periodic input with period .is (A) not periodic. (B) periodic having a period .. (C) periodic having a period 2.. (D) periodic having a period ./2 If the Fourier series coefficients of a signal are periodic, then the signal must be (A) continuous-time, periodic. (B) discrete-time, periodic. (C) continuous-time, non-periodic. (D) discrete-time, non-periodic. f the Fourier series coefficients of a signal are periodic, then the signal must be (A) continuous-time, periodic. (B) discrete-time, periodic. (C) continuous-time, non-periodic. (D) discrete-time, non-periodic. The algorithm used to compute any set of equally spaced samples of Fourier transform on the unit circle is (A) DFT algorithm (B) FFT algorithm (C) Goertzel algorithm (D) Chirp transform algorithm The steady-state error of a feedback control system with an acceleration input becomes finite in a (A) type 0 system (B) type 1 system (C) type 2 system (D) type 3 system The input to a controller is (A) sensed signal (B) desired variable value (C) error signal (D) servo-signa A system with gain margin close to unity or a phasemargin close to zero is (A) highly stable (B) oscillatory (C) relatively stable (D) unstable Peak overshoot of step-input response of an underdamped second-order system is explicitly indicative of (A) settling time (B) rise time (C) natural frequency (D) damping ratio A phase lag-lead network shifts the phase of a control signal in order that the phase of the output (A) lags at low frequencies and leads at high frequencies relative to input (B) leads at low frequencies and lags at high frequencies relative to input (C) lags at all frequencies relative to input (D) leads at all frequencies relative to input AP PGECET Question paper 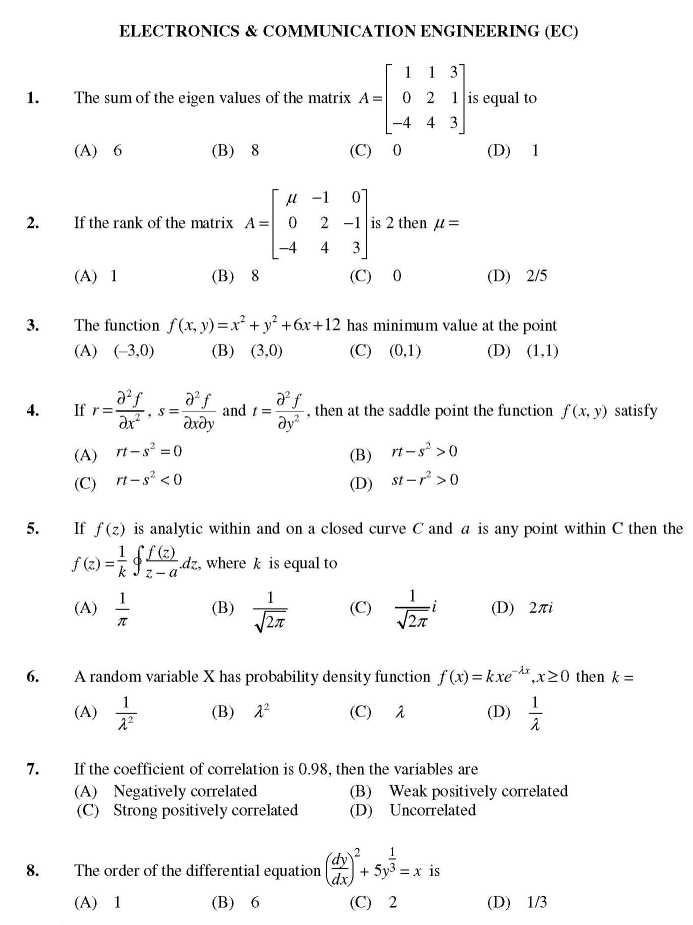  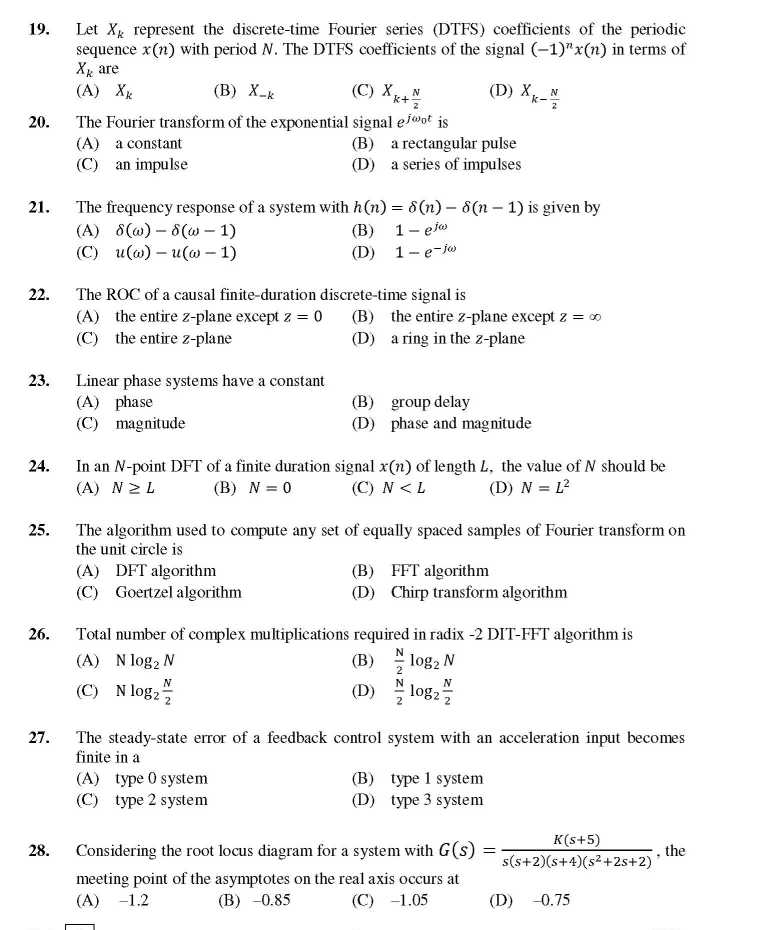   Rest of the Question paper you may get from the below Attachement that is Free to Download |